Posted on 25 mai 2016
in Composants
Pour créer une realisation que je détaillerai plus tard (automate pour nourrir mes chats), j’ai besoin d’un moteur.
J’ai donc acheté à un peu moins de 3euros un moteur sur Aliexpress, que je détaille ci après.

Le moteur pas à pas à 4 phases réducté (1:64) peut être positionné sur une valeur angulaire précise.
Il possède un couple important permettant de l’utiliser dans la plupart des petits montages.
Il est vendu avec son contrôleur ULN2003 incluant quatre LED qui indique son état.
Son driver ULN2003 (réseau de transistors Darlington) lui apporte la puissance que la carte Arduino ne peut pas fournir directement.
Caractéristiques du moteur 1x28byj-48
- Tension nominale: DC5V phases moteur
- Angle de pas: 5.625×1/64
- DC résistance: 200 Ω ± 7% (25c)
- Résistance d’isolement:> 10 m et oméga; (500 v)
- Rigidité diélectrique: 600 V ac/1ma/1 s
- Isolation grade: un
- Pull à vide en fréquence:> 600 Hz
- Pull à vide sur la fréquence:> 1000 Hz
- Tirez en couple:> 34.3mn.m (120 hz)
- Couple de détente:> 34.3mn.m
- Élévation de température: <40 K (120 hz)
- Bruit: <40db (120 hz, pas de charge, 10 cm)
- Moteur pas à pas avec une interface standard, lorsqu’il est utilisé directement enfichable.
- Drive Module taille du conseil d’administration: 2.8×2.8×2 cm
- Moteur pas à pas taille: 3.2×3.2 cm
Ce moteur peut être piloté par raspberry ou Arduino
[Top]
 Après description du moteur pas à pas, cet article détaille la programmation sur arduino.
Après description du moteur pas à pas, cet article détaille la programmation sur arduino.




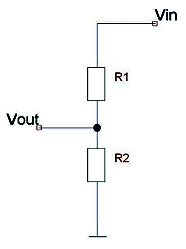 La tension de sortie du HC-SR04 est envoyée sur Vin et Vout est appliquée au GPIO. La tension résultante est Vout = Vin (R2/(R1+R2)).
La tension de sortie du HC-SR04 est envoyée sur Vin et Vout est appliquée au GPIO. La tension résultante est Vout = Vin (R2/(R1+R2)). Ce bouton a 4 pattes , les broches sont reliées deux à deux et fonctionnent par paire.
Ce bouton a 4 pattes , les broches sont reliées deux à deux et fonctionnent par paire.