Capteur SR04
Posted on 6 mai 2016 in Composants
Le capteur SR04 est un capteur de mesure de distances par utltrason.

- une broche (Gnd), utilisée pour mettre le module au GND
- une broche de sortie (Echo), utilisée pour informer de la fin de l’émission du train d’ultrasons et de son retour après réflexion sur l’obstacle ;
- une broche d’entrée (Trig pour Trigger), utilisée pour déclencher l’émission du train d’ultrasons ;
- une broche (Vcc), utilisée pour alimenter le capteur en 5 V.
Le principe est le suivant:
- Mettre le trigger à 1 et compter
- Ecouter ECHO, dès qu’il passe à 1 noter le temps.
Distance=temps / (340*2) metres
Attention : Le module est alimenté en 5V
Le 5V ne peut pas être appliqué directement sur une entrée du GPIO (ECHO) sous peine de destruction de l’entrée, et même parfois plus grave, celle du SoC !
Il faut donc diminuer cette tension en utilisant un diviseur de tension, appelé également pont diviseur :
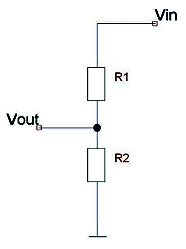 La tension de sortie du HC-SR04 est envoyée sur Vin et Vout est appliquée au GPIO. La tension résultante est Vout = Vin (R2/(R1+R2)).
La tension de sortie du HC-SR04 est envoyée sur Vin et Vout est appliquée au GPIO. La tension résultante est Vout = Vin (R2/(R1+R2)).
